










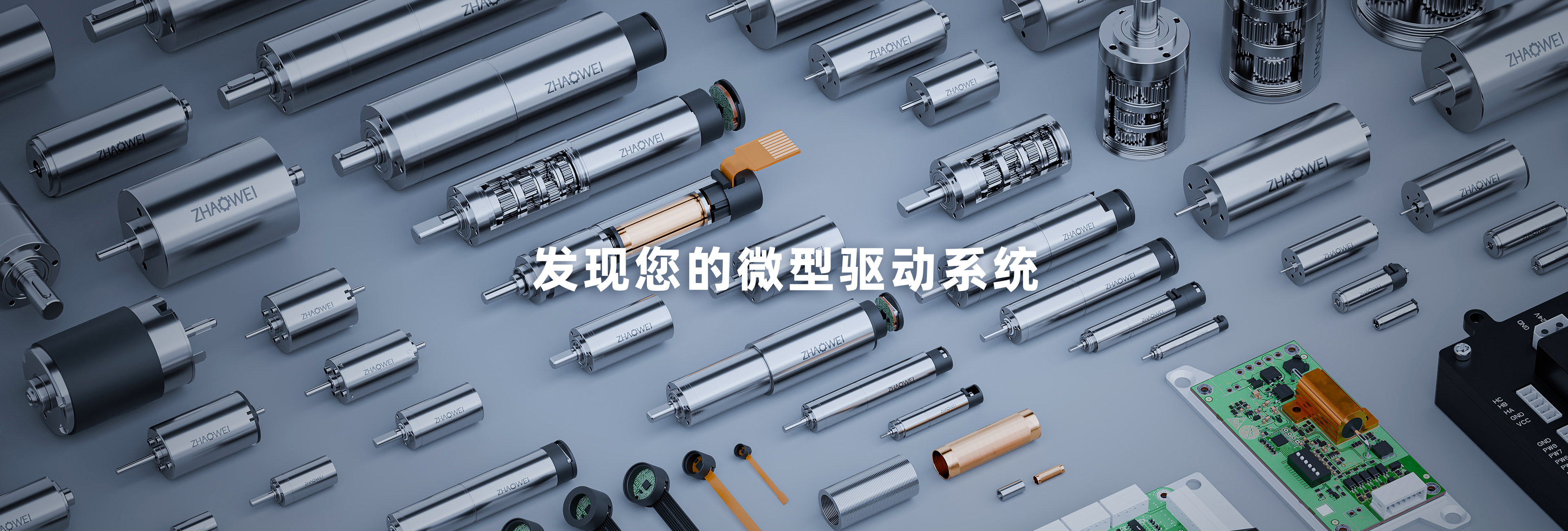
機器人手爪電機產品技術參數與定制開發服務
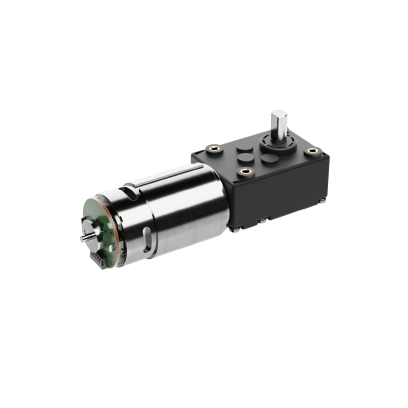
機械手是指能模仿人手和臂的某些動作功能,用以按固定程序抓取、搬運物件或操作工具的自動操作裝置。機械手是早出現的工業機器人,也是早出現的現代機器人,它可代替人的繁重勞動以提升生產的機械化和自動化,能在有害環境下操作以保護人身安全。機械手爪主要分為兩部分,即手臂和末端執行器。手臂利用關節的運動帶動末端執行器的動作,達到預定的位置進行預定的操作。機器人手抓電機是一種小功率微型驅動減速電機齒輪箱,主要驅動結構由驅動電機(微型電機)、齒輪箱(減速器)組裝而成的減速驅動設備,運用在機器人手臂、機械手驅動齒輪箱電機模塊上,簡稱為“機器人手抓電機”;驅動電機可采用直流電機、有刷電機、無刷電機、伺服電機、步進電機、空心杯電機、微型馬達作為驅動器,齒輪箱可采用行星齒輪箱、圓柱齒輪箱、蝸輪蝸桿齒輪箱作為減速器;技術參數通常是定制開發而成,例如輸出功率、減速比、輸出扭矩、電壓、齒輪箱結構、驅動電機類型、驅動噪音、驅動精度等技術參數是定制開發而成;兆威機電股份有限公司定制機器人手抓電機齒輪箱技術參數范圍在直徑規格在3.4mm-38mm之間,電壓在24V以下,輸出功率在50W以下,輸出轉速5rpm到1500rpm之間,速比范圍2-2000之間,輸出力矩1gf.cm到50Kgf.cm之間微型驅動齒輪箱減速系統。

定制開發服務案例:
項目名稱:機器人關節齒輪箱解決方案
項目背景:在溝通快速響應交互中,直流減速電機用于驅動機器人的關節,要求有較大功率質量比和扭矩慣量比、高啟動轉矩、低慣量和較寬廣且平滑的調速范圍。特別是機器人末端執行器(手爪)應采用體積和質量較小,并且能夠擁有短時過載能力較大的關節電機。
解決方案:兆威機器人微型關節齒輪箱研發生產,通過發展耐磨材料技術、加工工藝優化技術、潤滑技術、裝配技術及壽命檢測技術以及驅動機理的探索,提高了智能機器人感知與識別、機構與驅動、控制與交互等方面的性能。 全系列精密機器人用減速電機行星齒輪箱,直徑3.4mm-38mm,功率:0.01-40W,輸出轉速5-2000rpm,減速比5-1500,輸出扭矩1gf.cm到50Kgf.cm。